









台达PLC可编程逻辑控制器可应用于槽式光热发电跟踪系统
发布者:walt | 来源:台达集团-中达电通股份有限公司 | 0评论 | 14917查看 | 2017-12-05 14:14:00
随着现代工业的发展,全球能源危机和大气污染问题日益突出,太阳能这一清洁的可再生能源,已受到许多国家的高度重视和利用。中国不仅太阳能资源丰富,而且分布范围较广,因此充分利用太阳能资源成為重点能源战略。
由太阳能电池板的特性可知,其发电量与照射到它上面的光照强度成正比,接受太阳的直射光,可以得到太阳最大光照强度。试验证明,采用相同功率的太阳电池板,自动跟踪式光伏发电设备要比固定式光伏发电设备提高发电量至少25%以上,成本下降20%。由于太阳的位置每时每刻都在变化,若想在太阳能电池板上得到最大输出功率,就必须随时跟随太阳的运动轨迹,确保太阳光始终垂直照射到太阳能电池板,而太阳光自动跟踪控制系统的使用可以实现这一目的。
一、太阳跟踪技术介绍
光伏发电系统控制,根据系统是否存在反馈,可分为:闭环、开环、混合三种控制方式。整个光伏发电系统的架构如图1所示。
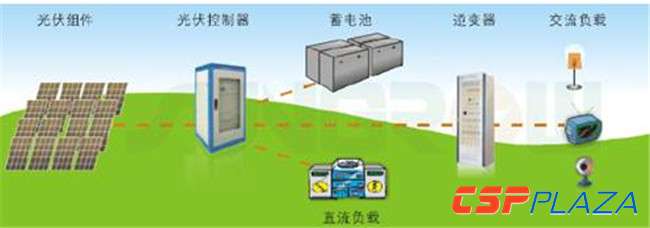
图1:光伏发电系统架构
1.开环控制
开环控制方式又分为匀速运动跟踪和视日运动跟踪。
(1)匀速运动跟踪
由于地球的自转速度是固定的,可以认为,早上太阳从东方升起经正南方向向西运动并落山,太阳在方位角上以15°/h匀速运动,24h移动一周。高度角等于当地纬度作为一个极轴不变。其跟踪过程是将固定在极轴上的太阳能电池板以地球自转角速度15°/h的速度转动,即可达到跟踪太阳,保持太阳能电池板平面与太阳光线垂直的目的。
该方法控制简单,但安装调整困难,初始角度很难确定和调节,受季节等因素影响较大,导致控制精度较差。
(2)视日运动跟踪
太阳的运行轨迹与时间、季节、当地经纬度等诸多复杂因素有关。因此,可以将上述相关的数据预先输入到PLC中通过程序计算出太阳方位角和高度角,实现时间和空间上的同步,最终得出实际角度以实现精确的控制。由于该方法精度高,具有较好的适应性,因此会详细介绍此方法。
2.闭环控制
闭环控制一般采用传感器来检测入射光线是否与接收光表面垂直,当出现偏差角度达到设定值时控制电机转动,从而实现对高度角和方位角的跟踪,常用的传感器有光电池、光敏电阻等。
3.混合控制
开环和闭环跟踪系统都存在着自己的优点和缺点:开环控制优点是在有云的情况仍能正常工作,缺点是存在累积误差,并且自身不能清除;闭环控制的优点是自身能够通过反馈来消除误差,但是也存在着在云多的情况下工作不稳定的缺点。
混合控制就是结合两者的优点和克服两者的缺点,在一般没有云的情况下使用闭环的传感器跟踪,但当云挡住太阳的时候,控制系统立即改变为开环控制方式,继续跟踪,直到云过去后,再重新使用传感器跟踪。交替开环和闭环的混合控制系统,结合开环和闭环控制的偏差信号,所以能够得到最佳的控制效果。因为闭环和开环控制本身都存在着内部偏差,所以这种混合控制方式将提供最准确的控制信号。
二、追日系统功能
追日系统的作用是使聚光器的轴线始终对准太阳,实现效率最大化。图2为抛物槽式集热器。根据入射光线和主光轴的位置关系,可以将跟踪形式分成:双轴跟踪和单轴跟踪。双轴跟踪使得入射光跟主光轴方向时刻保持一致。而单轴跟踪,只需入射光在主光轴和焦线的平面内即可。
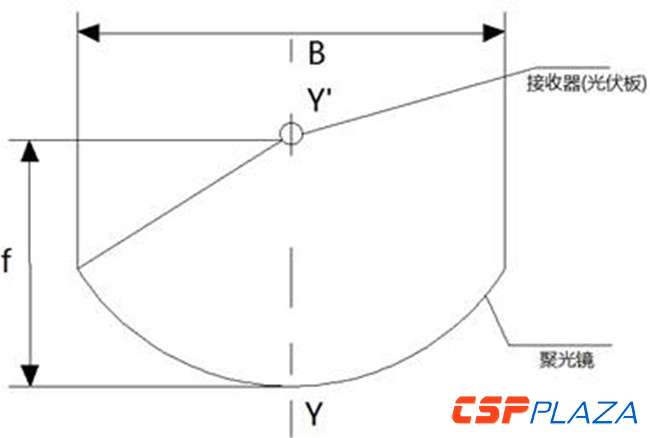
图2:抛物槽式集热器示意图
其中:B——聚光镜开口口径,f——反射镜焦距,Y—反线——主光轴
槽式聚光集热器一般是南北布置、东西跟踪或东西布置、南北跟踪,其特点是一维跟踪水平布置,大型槽式太阳能聚光器不仅驱动扭矩大,而且驱动旋转角度范围广。槽式聚光器采用主动式跟踪,其跟踪太阳的角度算法和二维双轴跟踪的跟踪角度算法有很大区别。
本文针对槽式太阳能热发电的聚光器特点设计槽式太阳能跟踪控制系统,采用PLC计算视日运动轨迹,对槽式聚光器进行主动式太阳跟踪,不依赖于气候变化。本文设计的槽式太阳能自动跟踪系统,能根据风速和时间自动实现保护,可实现全自动、全天候的太阳跟踪。如图3所示。

图3:槽式太阳能自动跟踪系统
1.追日算法
追日系统包括两个重要参数:太阳高度角和太阳方位角。
太阳高度角指太阳中心直射到当地的光线与当地水平面的夹角,即是指太阳光的入射方向和地平面之间的夹角。
太阳方位角即太阳所在的方位,指太阳光线在地平面上的投影与当地子午线的夹角,可近似地看作是竖立在地面上的直线在阳光下的阴影与正北方的夹角,取顺时针方向。如图4所示。
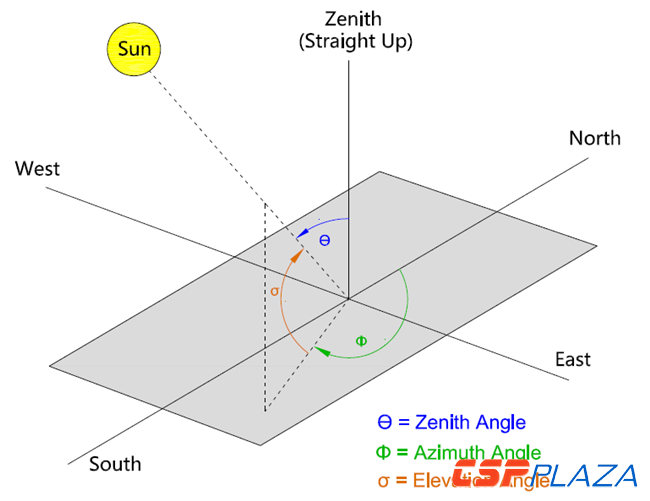
图4:太阳高度角和太阳方位角示意图
主动式跟踪需要精确计算太阳位置,比利时天文专家JeanMeeus和美国国家能源部可再生能源实验室(NREL)公布一种高精度太阳位置的计算算法(solarpositionalgorithm,SPA)。台达PLC提供专用的SPA指令,输入当地的经度、纬度等相关信息后,会自动得到当前太阳的高度角和方位角。如图5、表1所示。

图5:SPA指令输入界面

表1:SPA指令输入参数
聚光器跟踪太阳的运动包括东极限位到西极限位的逆时针旋转及对应的顺时针旋转,抛物槽式聚光器槽口几何中心朝正东方向定义为零位(东极限位),系统由东向西跟踪太阳逆时针方向为角度增加,系统由西向东顺时针方向为角度减少,抛物槽式聚光器槽口几何中心朝正西方向定义为180°(西极限位),跟踪角度范围为0~180°。槽式聚光器跟踪太阳的角度算法和二维双轴跟踪的跟踪角度算法有很大区别。在基于台达SPA指令计算当地当时的太阳高度和方位,再经过PLC计算出单轴旋转角度。如图6所示。
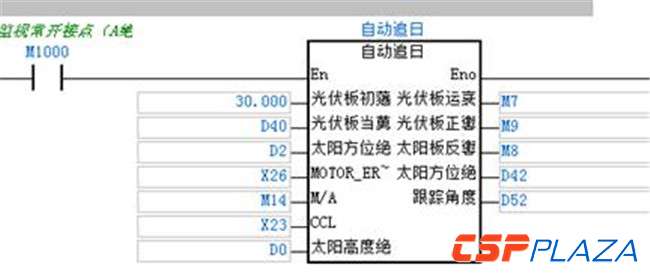
图6:自动追日显示界面
通过台达PLC的万年历来设定每天启动和停止跟踪的时间,到达停止时间后自动回原点,等到第二天自动启动跟踪追日。

图7:自跟踪状态界面
另外,追日系统还具有大风、大雪、高温自动降热和维修等保护功能。
结束语
本文介绍基于台达PLC的槽式单轴跟踪太阳能发电系统,采用主动式跟踪太阳的日运动轨迹控制策略,以简单的太阳位置计算法实现槽式太阳集热器的精确太阳跟踪,控制器不受外界天气和光电传感器影响。台达PLC提供专用的SPA指令,方便开发者計算太阳高度角和方位角,避免复杂算法编制。
相关阅读
最新评论
0人参与

马上参与
最新资讯
-
![]()
-
![]() 15小时前 09:32
15小时前 09:32 -
![]() 昨天 07-14 11:32
昨天 07-14 11:32 -
![]() 昨天 07-14 11:10
昨天 07-14 11:10 -
![]() 昨天 07-14 09:41
昨天 07-14 09:41 -
![]() 昨天 07-14 09:21
昨天 07-14 09:21 -
![]() 前天 07-13 17:48
前天 07-13 17:48 -
![]() 前天 07-13 16:50
前天 07-13 16:50 -
![]() 前天 07-13 14:04
前天 07-13 14:04 -
![]() 前天 07-13 13:54
前天 07-13 13:54 -
![]() 前天 07-13 13:40
前天 07-13 13:40 -
![]() 07-11 17:09
07-11 17:09 -
![]()
-
![]() 07-10 15:04
07-10 15:04 -
![]() 07-10 15:02
07-10 15:02
















